StretchBEV: Stretching Future Instance Prediction Spatially and Temporally
Adil Kaan Akan and Fatma Guney
In ECCV, 2022.
Images
Ground Truth
FIERY
StretchBEV-P


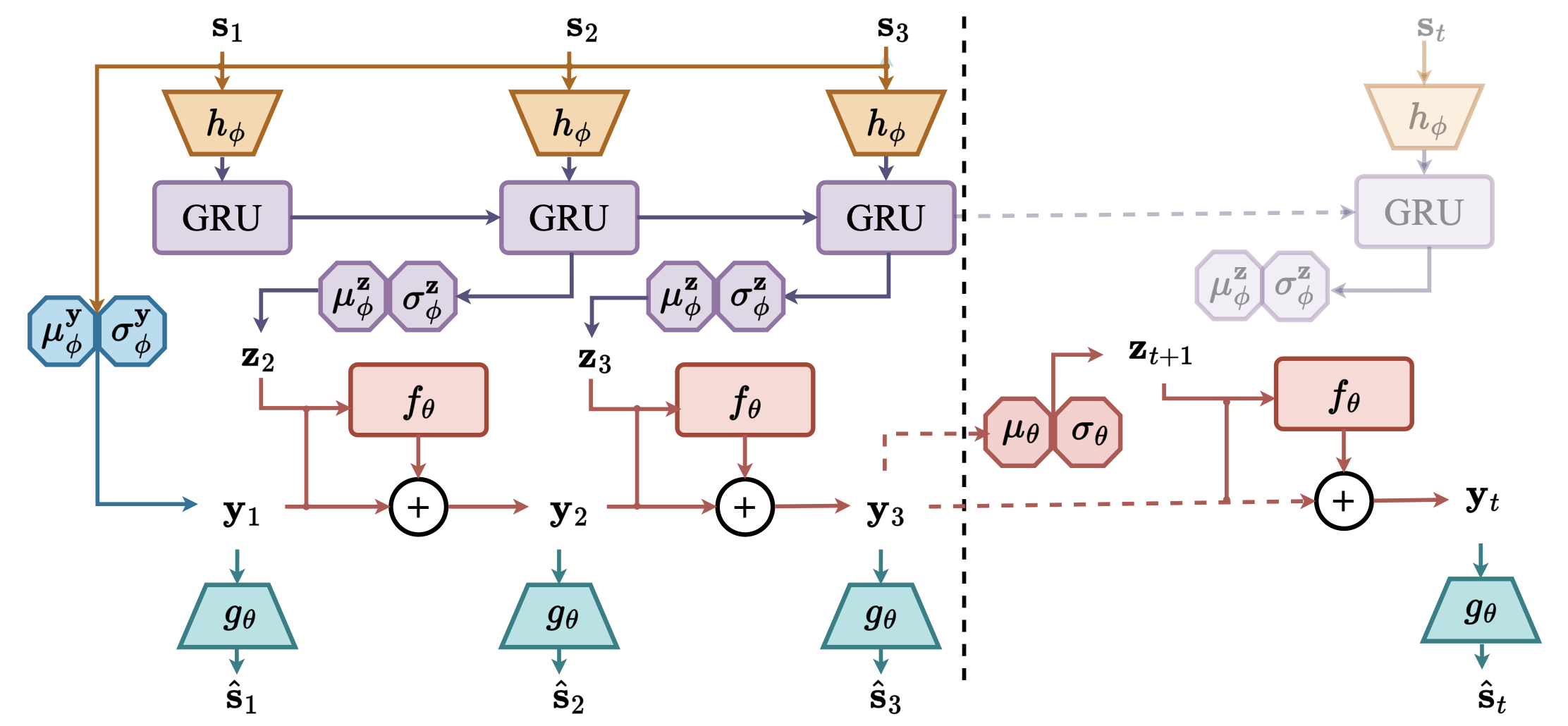
This figure shows the inference procedure of our model StretchBEV. We start with the first k=3 conditioning frames where we sample the stochastic latent variables from the posterior distribution. On the right, we show the prediction at a step t after the conditioning frames where we sample from the learned future distribution. The dashed vertical line marks the conditioning frames.
Images
Ground Truth
FIERY
StretchBEV-P
Images
Ground Truth
FIERY
StretchBEV-P


Example comparisons with FIERY. From left to right, we show images, ground truth labels, FIERY predictions and StretchBEV-P predictions. We show examples for short (top 2 examples) and mid settings (bottom 2 examples), 2 and 4 seconds into the future respectively.
In this section, we provide additional qualitative examples where we show samples that are generated by FIERY and StretchBEV-P.
FIERY
StretchBEV-P
Adil Kaan Akan and Fatma Guney
In ECCV, 2022.
@InProceedings{Akan2022ECCV,
author = {Akan, Adil Kaan and G\"uney, Fatma},
title = {StretchBEV: Stretching Future Instance Prediction Spatially and Temporally},
journal = {European Conference on Computer Vision (ECCV)},
year = {2022},
}
Kaan Akan was supported by KUIS AI Center fellowship, Fatma Güney by TUBITAK 2232 International Fellowship for Outstanding Researchers Programme.
The template for this website was borrowed and adapted from Despoina Paschalidou and Niklas Hanselmann.